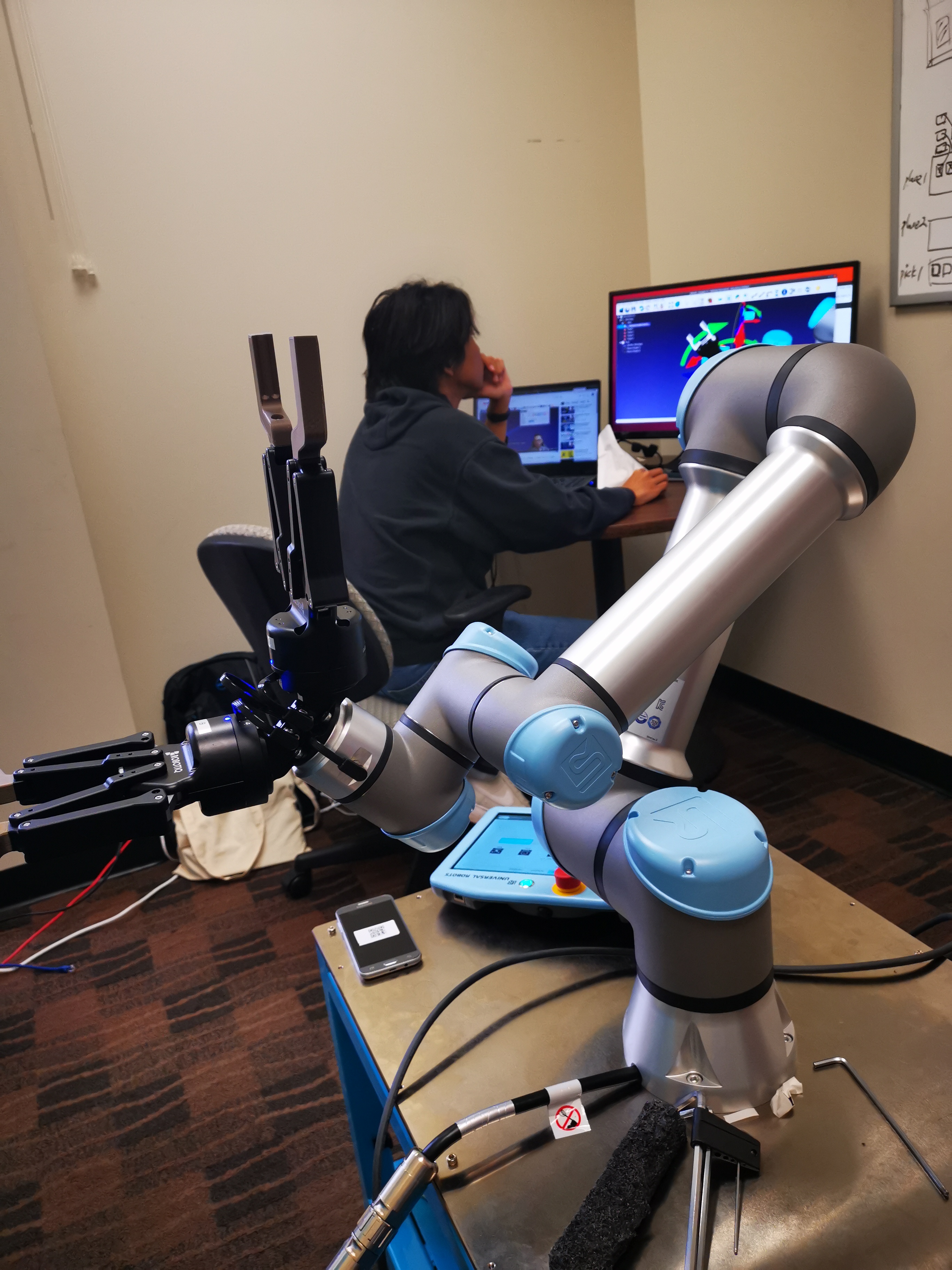
Renewable Recycling Robot with UR5e Part 1
UR5e 6-DOF Industry Robot Pick and Place
Overview
I have been selected to participate a research project by a renewable smartphone company to develop the next generation robot automation system for renewable smart phones. The goal is to use Universal Robot UR-5e to automate the renewable electronics in warehouse. The challenge When talking about industrial robotics , we tend to think about robots in car factories or carrying out construction tasks. However, this one is to improve the processing speed and make the old phones to be reused. The solution is to use robotic arms which are able to identify, grip and move waste materials intended for recycling.
With increased customization for both hardware and software robots can offer a flexible, scalable, compact and cost-effective production line alternative to older machinery that require large floor space, are difficult to adapt and include higher maintenance costs.
In the case of phone renewable industry there are no off-the-shelf robotic solutions that can cover all the production steps in the testing and cleaning processing. Introducing collaborative robots into the processing could help to promote higher throughput in safety and human-working conditions in the industry and make automation more affordable for smaller production plants.
This work explores the potentially novel use of collaboration robot(CoBot) in the warehouse processing context as a possibility to enable a scalable automation for processors, thereby contributing to sustainability and security of supply in the sector.
In the renewable electronics industry there are different levels of automation:
-
Low automation: limited automation tools implemented where manual labour carries out major processes such as move electronics from tests stations and perform phone surface cleaning and condition grading.
-
Semi-automation: some processes automated, with manual labour needed during or in between test stations where humans use electric test stations for part of the process like surface cleaning and polishing.
-
Full automation: processes automated as far as possible, and robotics and data tools implemented, where specialized machinery (including robotics, conveyers) has been able to demonstrate a fully autonomous line for primary processing that offered better yield and reduced labour cost,
The challenge ahead is to improve the precision of technology and increase the UPH (unit per hour). The robot arm makes use of computer vision and deep learning artificial system to identify the collected object and create optimal path for factory processing process.
Research areas
- Study the Aruco tag to help precision localization of electronics.
- QR code recognition and center localization of phones
- Vision aided pick and place with UR-5e
- Python centralized controller from co-ordinate robots and status monitor.
- Robot simulation to optimize the process before hardware integration
- Intelligent conveyor integration
- Optimal Path Algorithm for scheduling multiple rails robot arms
Video Links
Here is the video of what has been achieved with UR5 Pick and Place demo
Contents

Python, Java, ML
