Renewable Recycling Robot with UR5e Part 2
UR5e RoboDK Simulation
Overview
Collaborative robot are changing the way people work in factories by allowing for much more interaction between robots and humans. In addition, they offer multiple levels of collaborative operation. While traditional work cells separate robots from workers entirely, collaborative robot are built to share the workplace, working next to humans.
One of the most helpful aspects of using simulation for automation design is simulation. It enables users to examine what the operator can see. Clear line-of-sight allows the operator to work more efficiently. A good automation design and robot program assures good visibility and reachability. Collaborative robot operations can be verified using the simulation.
When placed phones in the processing unit, the robot needs to reach all of its locations that enable it to perform the given tasks, such as is pick up, drop off, plug phone cable, test, etc. Simulation allows the user to place the robot in a position where all of these locations are reachable , and at the same time maintain smooth robot motion, minimize cycle time and reduce the risk of injury to the operator.
RoboDK is a powerful simulator for industrial robots and robot programming. RoboDK’s simulation and offline programming tools allows developers to program UR robots outside the production environment, eliminating production downtime caused by shop floor programming.
I happen to found that a team at NASA’s Langley Research Center is using multiple robots and RoboDK to automate and streamline the inspection of aircraft fuselages. And I am so delighted that the expereince I learned can be very useful and I am so happy to be able to learn it from both simulation and real hardware.
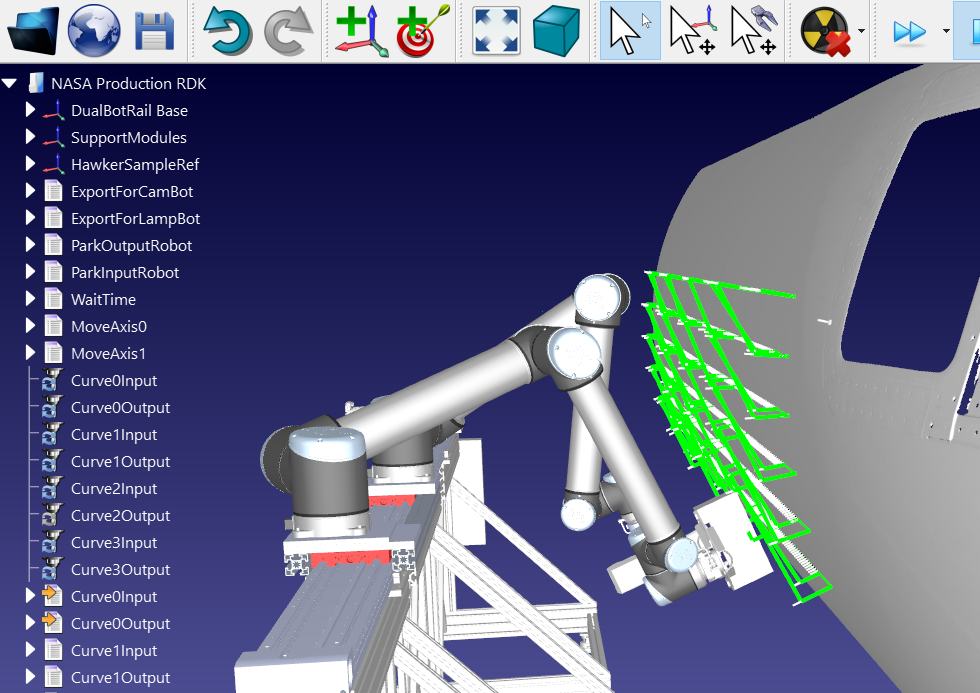
- NASA team use RoboDK to operate Universal Robot*
Implementation
Here are simulations created wth RoboDK.
UR5 Simulation demo
UR5 Simulation demo
Contents

Python, Java, ML

