Renewable Recycling Robot with UR5e Part 3
UR5 RoboDK Online and Offline Programming
Overview
In this company I used RoboDK, which is a 3D simulation and offline/online programming environment, for robot simulation. Real time online programming allows executing the movements on the real robot at the same time as it is being simulated. Modifications in the original program can be made in real time and synchronization between robots can be easily managed. This is achieved by using RoboDK Software.
To make this work, I need to run the RoBoDK running from a Ubuntu 18.04 notebook and then connect with the real robot Universal Robot UR-5e. The UR-5e needs to be setup as remote mode. Here is the steps
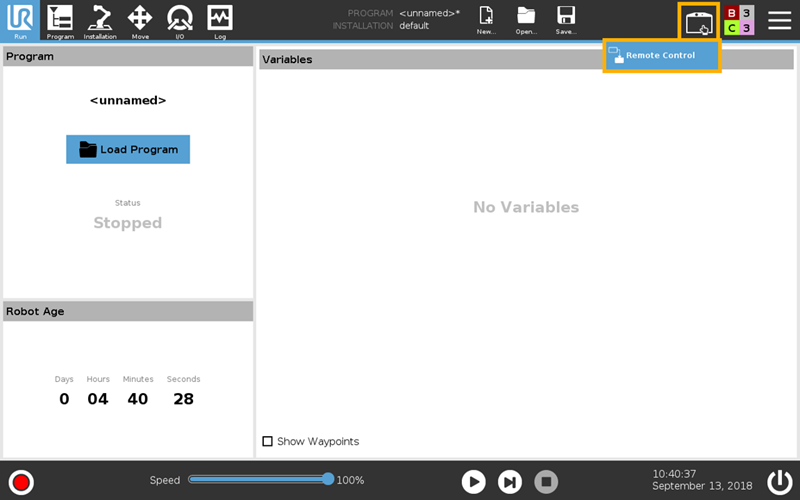
Find Remote Control in System and click Enable. Then teach pendant icon will appear on the upper right.
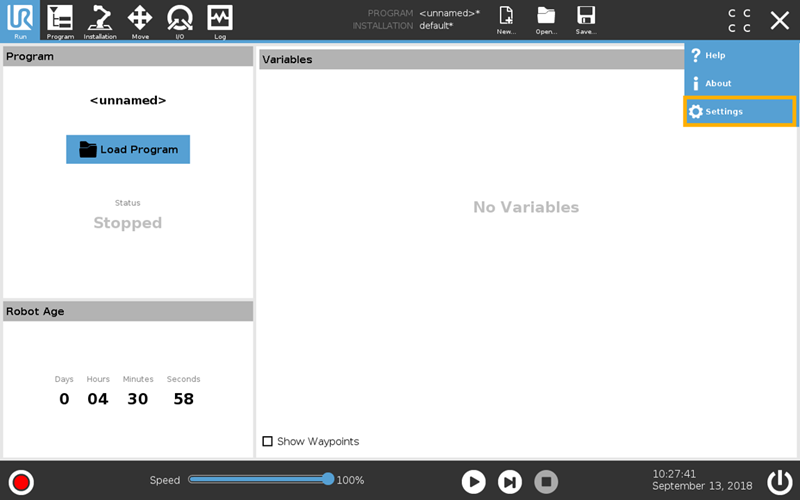
Choose to enable the remote control
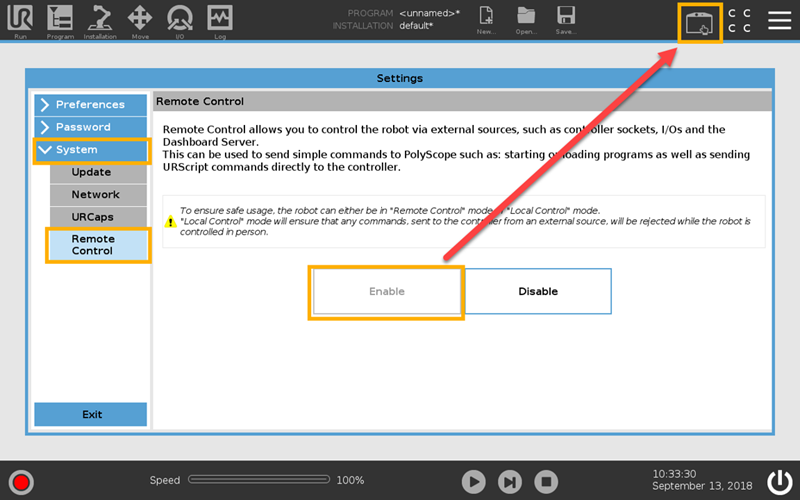
Click the teach pendant icon on the upper right and select Remote Control
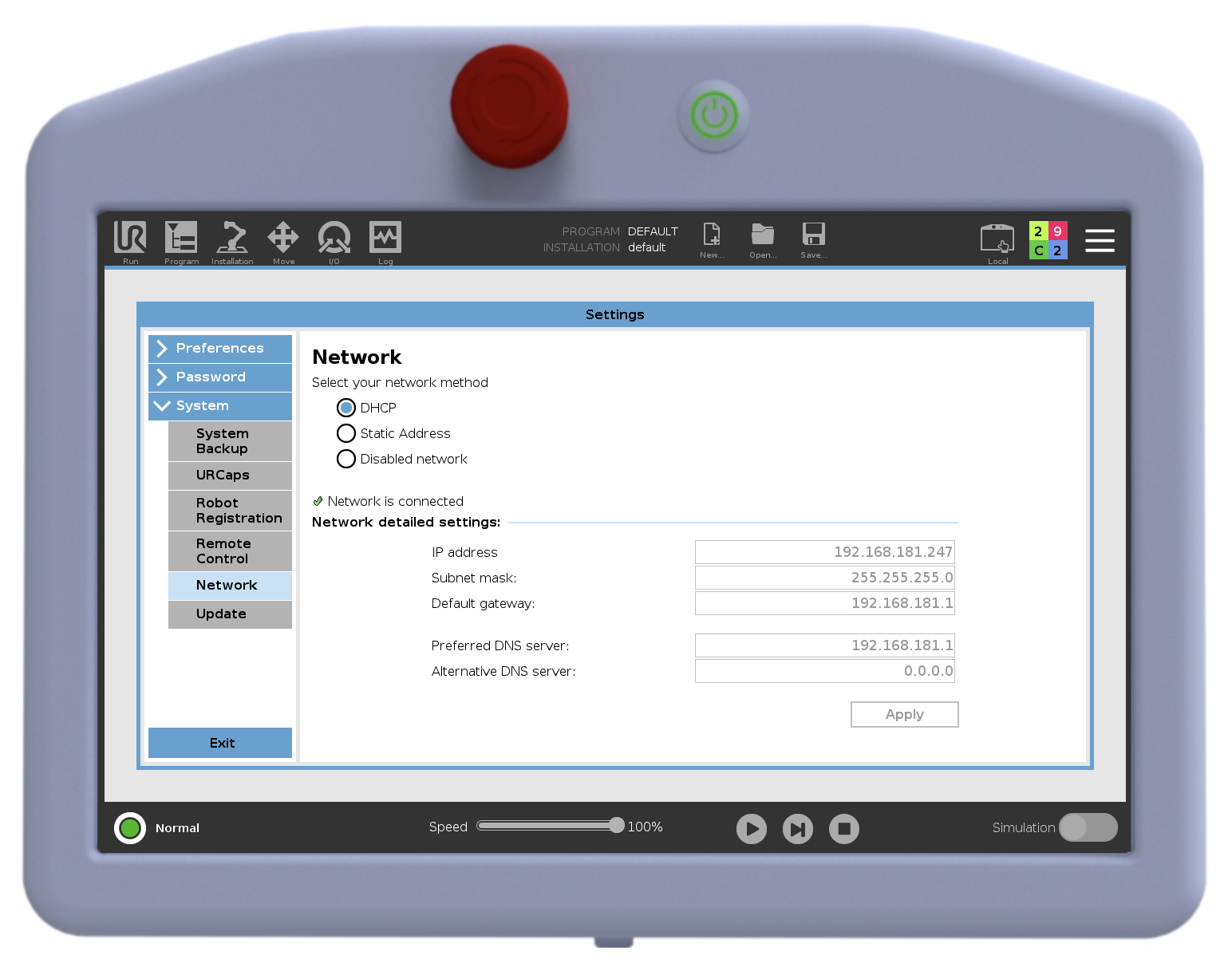
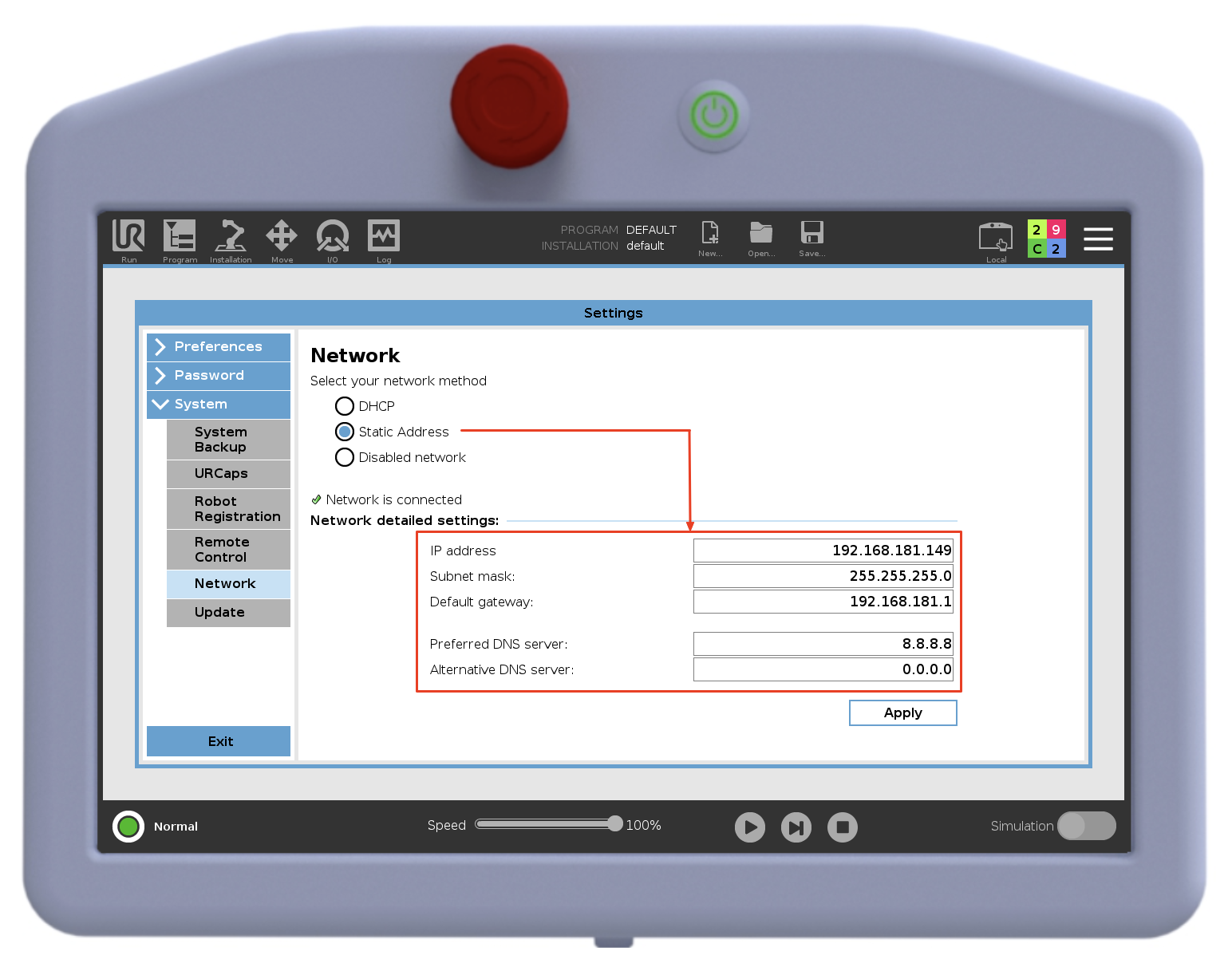
Choose from network setting and setup a static IP for this robot.
From network menu set a static IP for this UR5e.
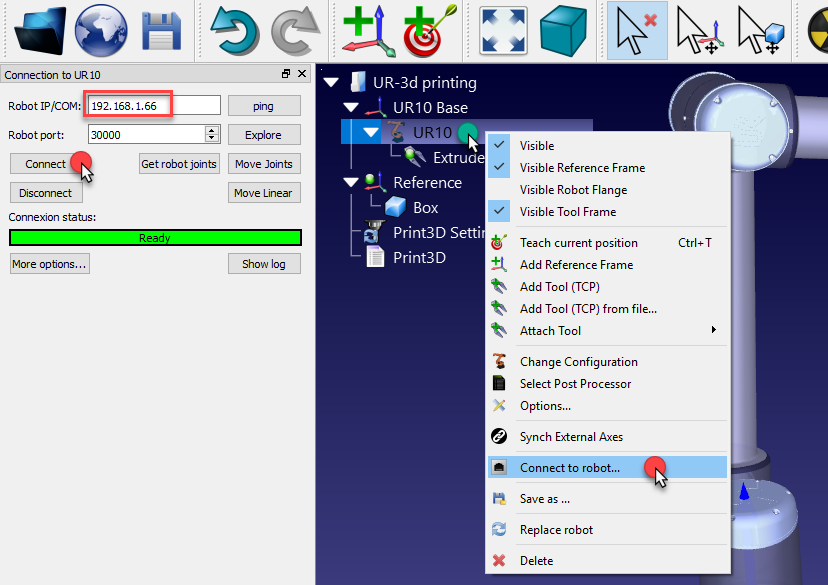
Then from the roboDK software, choose to connect Robot. Make sure the IP is what was setup previously. If connect successfully then the status bar will become green.
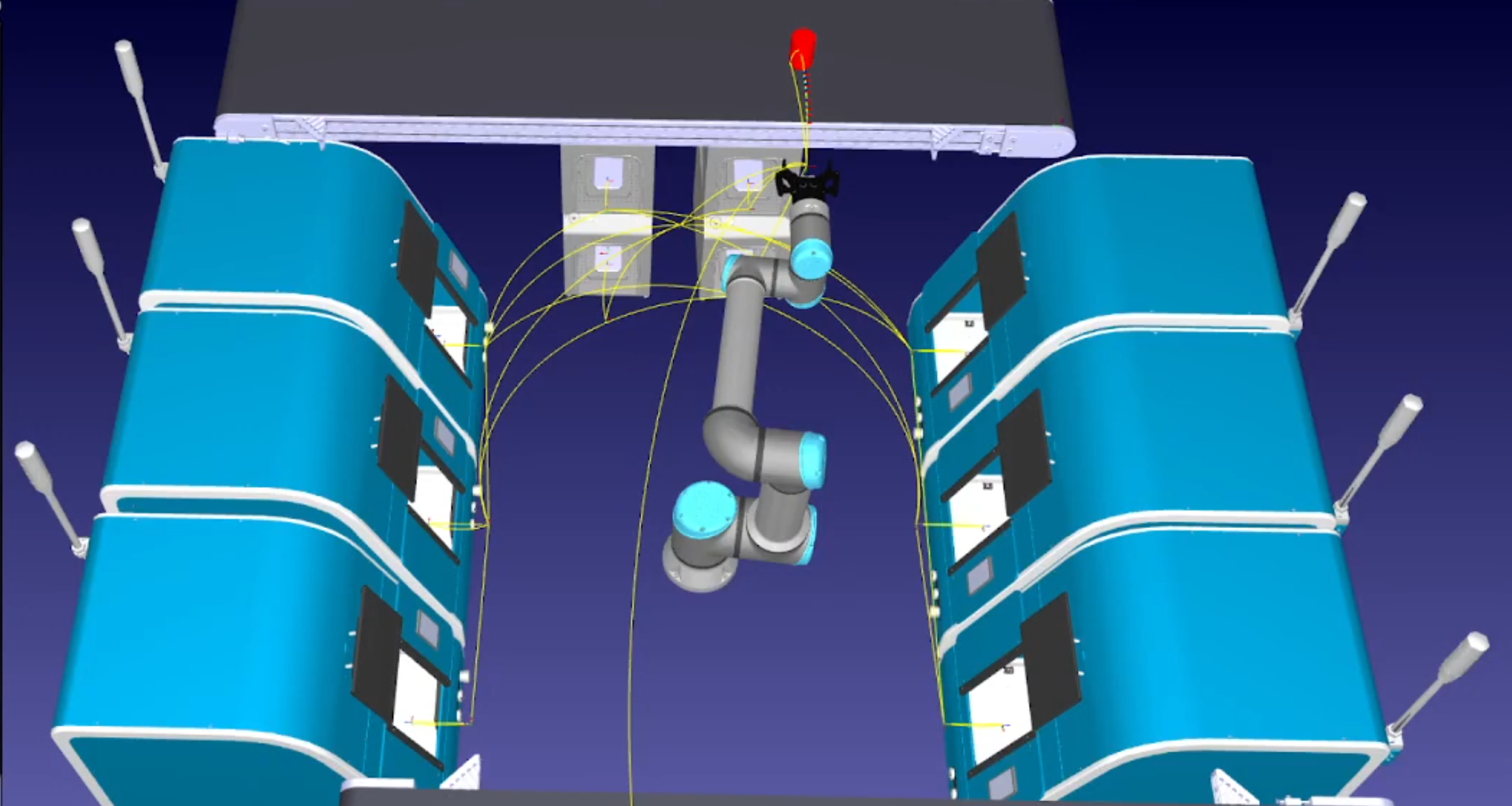
Implementation
Here is the online programming prototype what I created for pick and place.
Contents

Python, Java, ML